FIT0260 Utu (USD) [2135Stock Ngahau]
- 1 pcs$19.69025
- Te waahanga waahanga:
- FIT0260
- Kaihanga:
- DFRobot
- Whakaahuatanga Taipitopito:
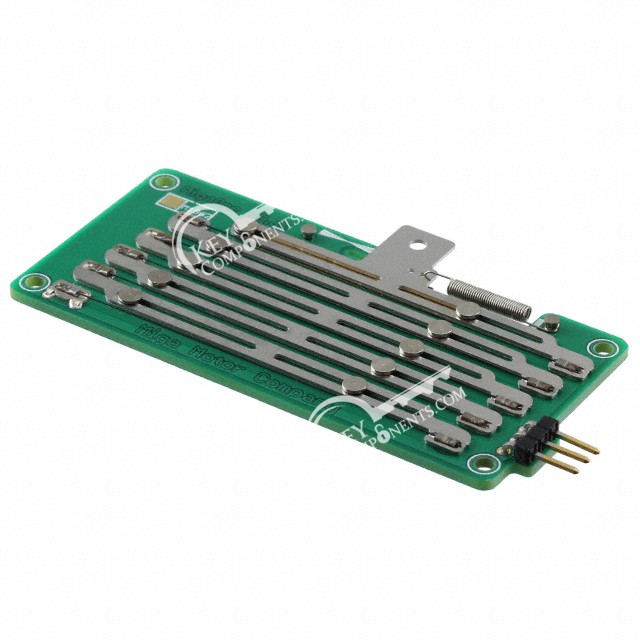
- SOLENOID PUSH 5-30V. DFRobot Accessories Memory Metal Actuator - MigaOne - 10
- Ko te wa kaiarahi paerewa a te kaihanga:
- I roto i te taonga
- Te whare noho:
- Kotahi Tau
- Chip Mai:
- Hong Kong
- RoHS:

- Te tikanga utu:
-

- Te ara kaipuke:

- Ngā Kāwai Whānau:
- KEY Components Co, Ko te LTD he Kaiwhakarite Taonga Hiko e tuku ana i nga waahanga hua tae atu ki: Motuka Peepae, Motuka - AC, DC, Ko te Solenoids, he Kaiwhakarite, Nga taputapu and Poari Hoahuri Motiki, Paerewa ...
- Whakapai Tinana:
- We specialize in DFRobot FIT0260 electronic components. FIT0260 can be shipped within 24 hours after order. If you have any demands for FIT0260, Please submit a Request for Quotation here or send us an email: rfq@key-components.com






FIT0260 Nga Hua Hua
Te waahanga waahanga :
FIT0260
Kaihanga :
DFRobot
Whakaahuatanga :
SOLENOID PUSH 5-30V
Toa :
MigaOne®
Wāhanga wahi :
Active
Hangarau :
Shape Memory Alloy (SMA)
Momo :
Open Frame (Push)
Huringa Tiute :
-
Tauira - Whakatau :
5 ~ 30VDC
Te Roa Korehau :
0.325" (8.26mm)
Te Mana (Watts) :
-
Te Awhina DC (DCR) :
5.4 Ohm
Huringa Tiki :
-
Momo Momo :
Chassis Mount
Te Taera Mutu :
Pin Header
Rahi / Rahi :
2.875" L x 1.375" W x 0.110" H (73.03mm x 34.93mm x 2.80mm)
Diameter - Koro :
-
Maama Taputapu :
-
Nga Pūrongo Hou
Kia Korero Ma Te Korero
-

-

-

-

-

-

ROB-10551
SparkFun Electronics
STEPPER MOTOR PM BIPOLAR 12V. SparkFun Accessories Small Stepper Motor
Nga Wahanga Panu
- DSOS-0416-204D
- F0463A
- F0421A
- DSTL-0829-12
- DSTL-0840-05
- F0492A
- DSML-0630-12C
- F0481A
- DSOL-0630-12C
- 3992
- F0451A
- DSTL-0216-18
- DSOS-0416-24D
- DSOL-0630-05C
- F0473A
- DSML-0630-18C
- DSML-1153-12E
- DSML-1153-12C
- DSML-1153-24C
- DSML-1153-24P
- DSML-1153-12P
- DSOS-0416-18D
- DSML-1153-24E
- DSML-0224-24
- DSML-1153-18E
- DSML-1153-18C
- DSML-1153-18P
- DSTL-0418-12
- DSOL-0630-05E
- DSOL-0630-24C
- DSML-0630-12P
- DSOL-0630-24E
- DSOL-0844-12
- DSOS-0416-102D
- DSOL-0630-18C
- DSOL-0630-18E
- F0494A
- DSTL-0418-06
- DSML-0630-24C
- G0412A